

大恒图像被动式双目立体视觉实验系统主要面向高等院校本科开设机器视觉、图像处理、人工智能和智能制造实验和实训课,或者研究生做课题和科研项目研究使用,旨在为双目立体视觉方面人才的培养提供一个原理验证的开放性教学平台,让初学者深入浅出地了解到双目标定的原理,实验系统提供了完整的双目标定和立体重构的程序软件,完整的机器视觉系统硬件能够让整个双目立体视觉实现变的简单高效,易于理解;结合立体视觉软件平台,初学者可以了解到整个算法的实现流程。双目立体实验平台可支持三自由度的相机位姿调整,能够适应双目测距、双目重构、运动跟踪等实验。
提供配套的教学文档,理论与实践可高度统一
实现双相机同步采集,与实际应用高度贴合
软件平台界面简洁、易于操作
算法流程简洁明了
在软件平台上可实现二次自主开发,灵活操作
结合MVTec公司的HALCON软件,可实现功能扩展
被动式双目立体视觉原理
双目立体系统组成
双目立体视觉标定、重构、测量算法
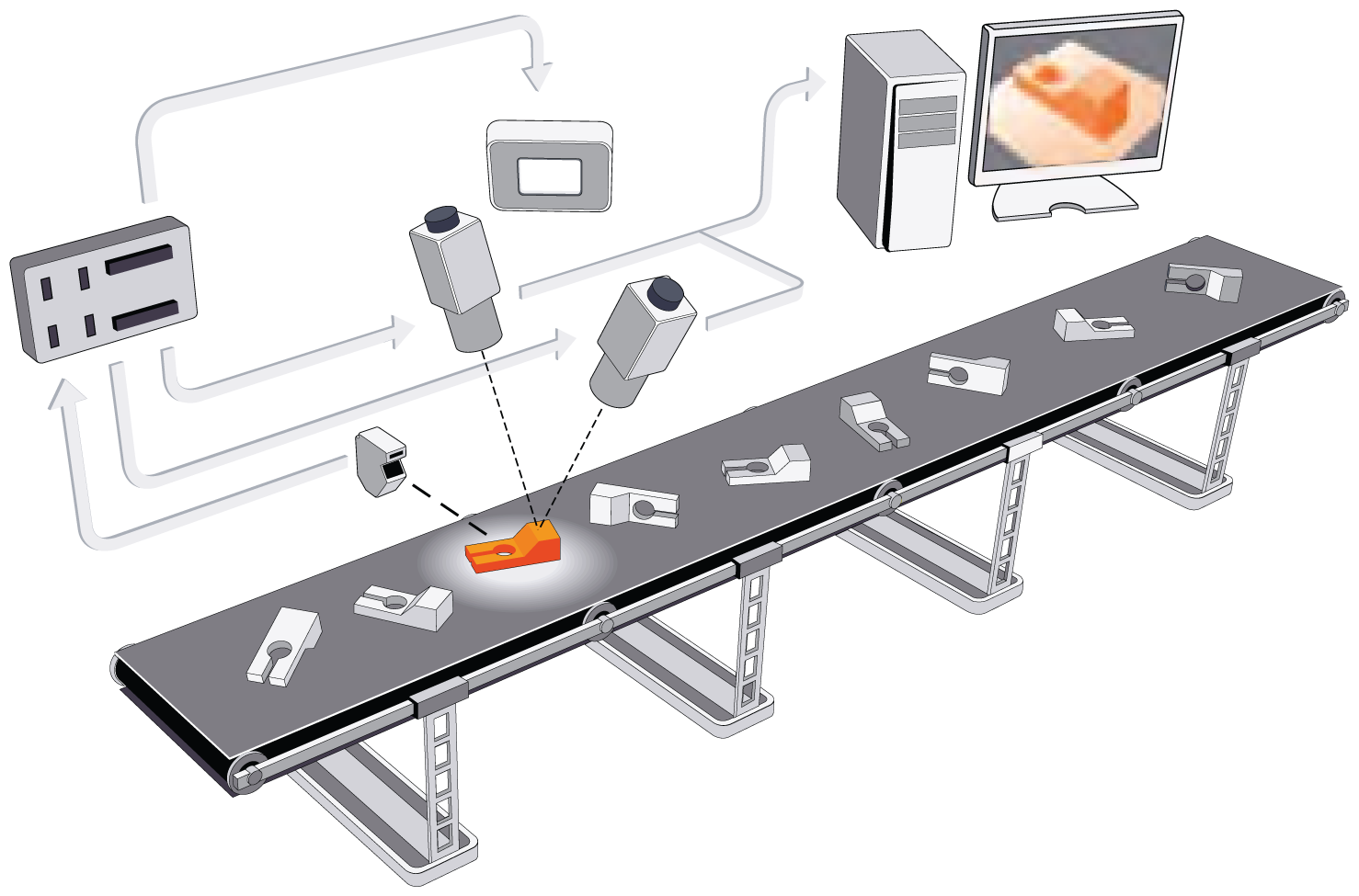
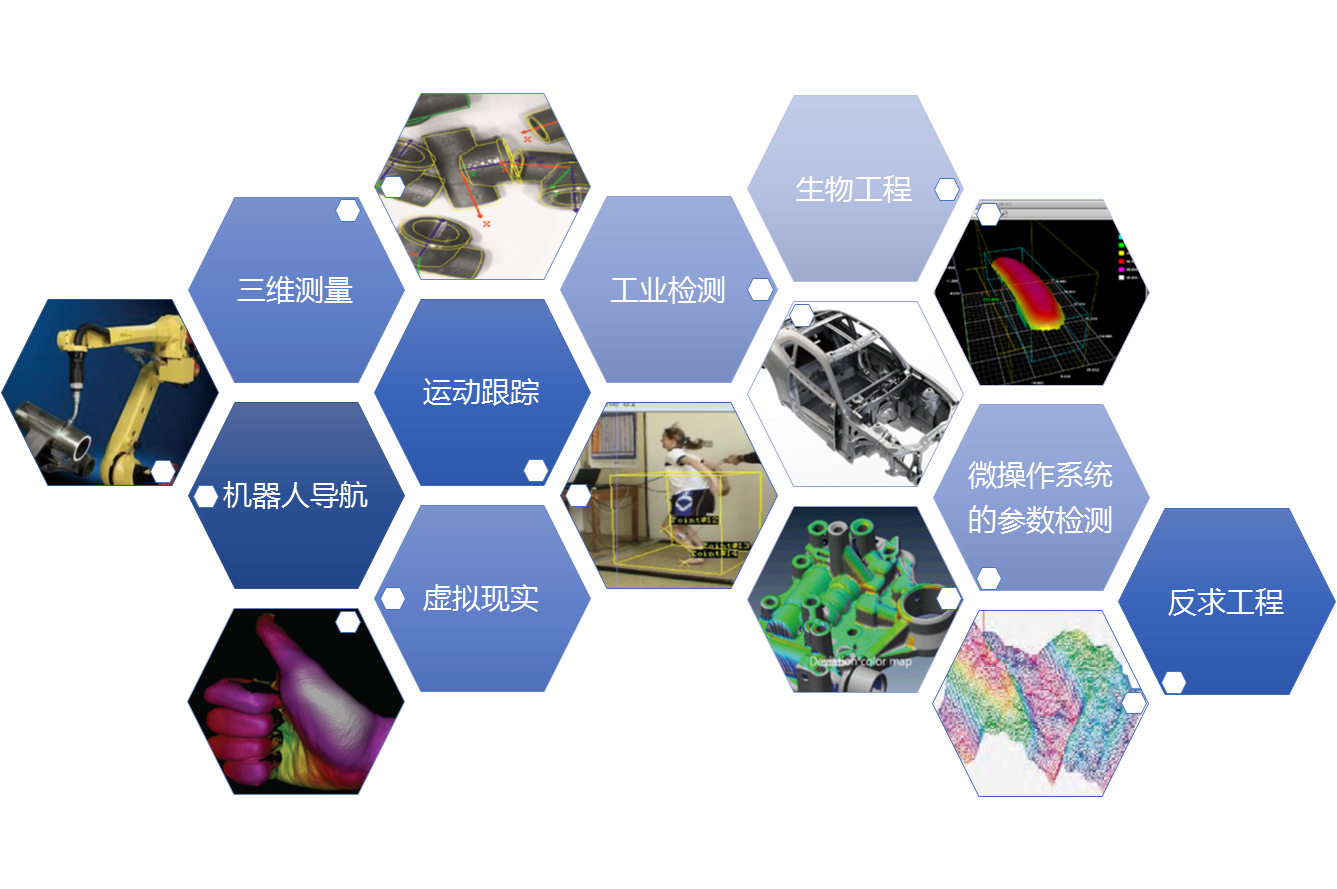
立体视觉在工业上的案例
序号 | 主要组件 | 数量 |
1 | 1 | |
2 | 工业数字相机 | 2 |
3 | 镜头 | 2 |
4 | 环形光 | 2 |
5 | 标定板 | 1 |
6 | 最新版本HALCON开发版 | 1 |
7 | 大恒图像教学实验软件 | 1 |
8 | 被测样品 | 若干 |
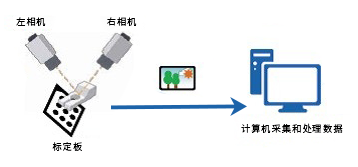
实验采用两台相同分辨率的相机,配合相同焦距的镜头,从不同角度拍摄同一物体。通过相机标定及纹理匹配,可实时获得物体表面3D数据,并可重构出物体表面信息。以上过程均在组态式的立体视觉软件开发平台上完成,可实时地查看结果和调整参数。相机把采集得到的图像数据通过常用的数据传输接口,将数据传送到计算机中。
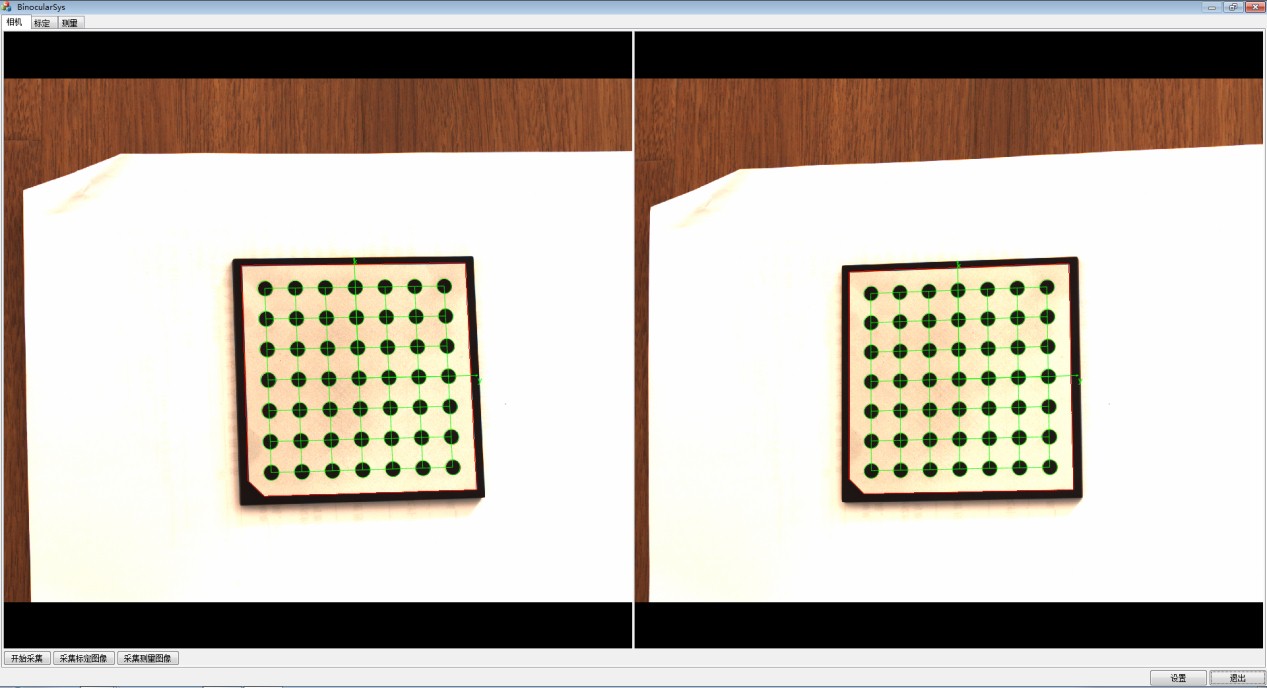
观测传输出来的图像数据,适当调整双相机的姿态,使得标定板可以同时出现在两台相机的视场中。拍摄多幅标定板图像以及进行相应的求解运算,得出相机的内部参数和右相机相对于左相机的位姿即外部参数。运用标定结果,找出左右相机中的对应点坐标即立体匹配过程,获得视差图像,进而计算出深度信息或者对应点的XYZ坐标
立体视觉软件平台是一款大恒图像自主研发的开放性软件开发平台,用户可在该软件平台上自主搭建实验程序。同时,也可在该平台上直接调用双目立体视觉示例程序。该示例程序在软件实验平台上实现标定、三维重构等功能。通过简单易用的标定插件,用户在改变相机位姿后可以快捷地实现重新标定。通过相机的标定以及纹理匹配,重构物体表面信息。以上过程均可以通过组态的方式在软件实验平台上完成,并可以实时查看结果、调整参数。除此之外,该软件平台还支持一些常用算子,如图像滤波、图像分割、匹配以及Blob分析等。

 |  |
左相机 | 右相机 |
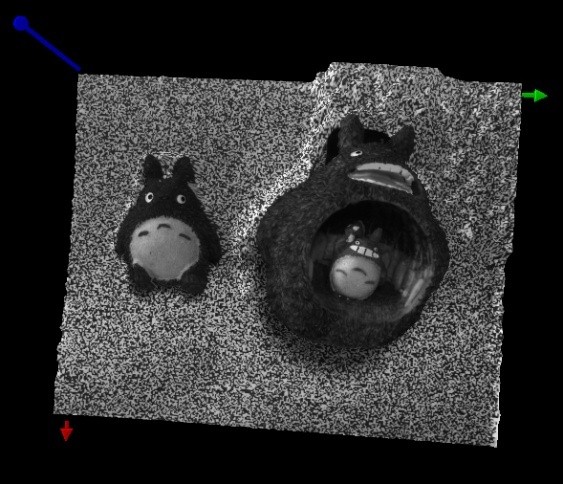 | 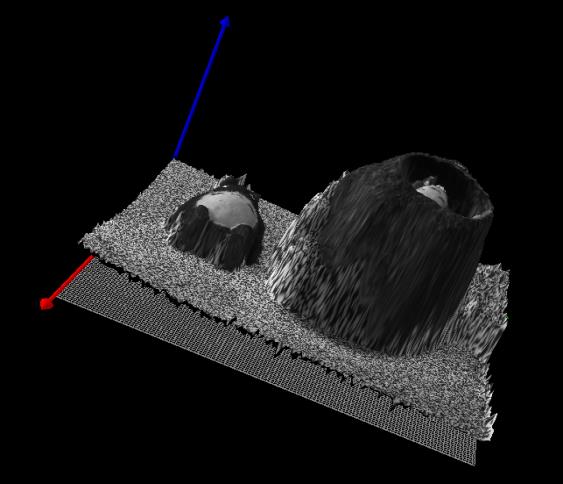 |
3D数据及实验结果 | |
分项名称 | 主要参数 | 分项名称 | 主要参数 |
相机可移动范围 | 240mm,精度:1mm | 相机帧率 | 14fps |
相机旋转范围 | 0°~360°,精度:1° | 像素尺寸 | 4.4μm×4.4μm |
台面尺寸 | 500mm×400mm | 光谱 | 黑白 |
相机支架前后调节范围 | 250mm | 靶面尺寸 | 1/1.8” |
主光源支架兼容光源尺寸 | 30mm~200mm | 焦距(mm) | 25 |
立柱高度 | 800mm | 工作温度 | 0℃~+50℃ |
相机分辨率 | 1628(H)×1236(V) | 工作湿度 | 10%~80% |

地址:北京市海淀区苏州街3号大恒科技大厦北座12层
邮箱:sales@daheng-imaging.com
 机器视觉基础实验方案
机器视觉基础实验方案
 机器人视觉技术实验方案
机器人视觉技术实验方案
 高级视觉算法应用系统方案
高级视觉算法应用系统方案
 机器视觉教学实验平台
机器视觉教学实验平台