大恒图像基于双目视觉的六轴机械手物料分拣系统主要面向大中专和高等院校专科本科开设机器视觉、机器人视觉、人工智能和智能制造实验和实训课,或者研究生做纵向项目验证。系统使用双目立体视觉方案配合机械手进行检测,基于手眼标定算法,提取物体的3D信息,定位被测物3D信息相对于机械手基座的3D位姿并进行通讯,最终实现用机械手对物料框中的被测物进行分类抓取。该分拣系统可应用于药片、胶囊、包装、食品、零件生产加工、汽车零部件加工等工业流水线智能自动化制造行业。
六轴机器人控制技术
手眼标定技术
双目立体视觉技术
双目相机与机器人标定技术
激光点提取技术
3D数据处理技术
图像处理技术
结构光3D原理
3D手眼标定原理
3D数据获取和数据处理
3D模板匹配定位
运动跟踪算法
ABB、安川、EPSON等机械手使用和编程
基于视觉的机械手在工业上的案例
l 配套的实验平台及固定装置 l 六轴机械手及机械手控制器 | l HALCON算法开发软件 l 视觉系统固定装置 | l 双目立体视觉系统 l 机器人手抓及气动装置 |
基于视觉的机械手实验系统软件集成了完整的视觉控制和参数修改功能、机械手运动控制功能、HALCON标定及算法等,提供的实验算法及其扩展功能均可在 HALCON 交互式的编程环境 HDevelop 中实现。学习者可以通过软件控制整个系统中各个组件的功能程序,更加深刻的理解和学习实际项目工程中如何实现各个组件之间的协调功能,以及深入理解机器视觉和机器人之间的手眼标定算法和运动控制功能。

|
模块 | 性能 | 参数 | |
六轴柔性多关节机器人模块 | 运动自由度 | 六轴 | |
安装方式 | 台面安装 | ||
最大运动范围 | P点通过J4/5/6中心 | 600mm | |
手腕法兰面 | 665mm | ||
最大运动速度 | 第1关节 | 450°/s | |
第2关节 | 450°/s | ||
第3关节 | 514°/s | ||
第4关节 | 555°/s | ||
第5关节 | 555°/s | ||
第6关节 | 720°/s | ||
本体重量 | 27kg | ||
重复定位精度 | ±0.02mm | ||
最大运动范围 | 第1关节 | ±170° | |
第2关节 | -160°~+65° | ||
第3关节 | -51°~+225° | ||
第4关节 | ±200° | ||
第5关节 | ±135° | ||
第6关节 | ±360° | ||
负载 | 最大值 | 4kg | |
原点复位 | 无需原点 | ||
用户电路 | 9 针 (D-Sub 模拟接口) | ||
适用适配器 | RC700 | ||
机器视觉模块 | 双目立体视觉相机 | 1628(H)×1236(V),CCD | |
传输数据接口 | USB3.0 | ||
照明方式 | 环形光源 | ||
软件功能 | 定位、区分、测量等 | ||
二次开发 | 支持多种开发语言 | ||
实验平台 | 尺寸 | 1200mm×800mm×500mm | |
围栏尺寸 | 1500mm×900mm×700mm | ||
地址:北京市海淀区苏州街3号大恒科技大厦北座12层
邮箱:sales@daheng-imaging.com
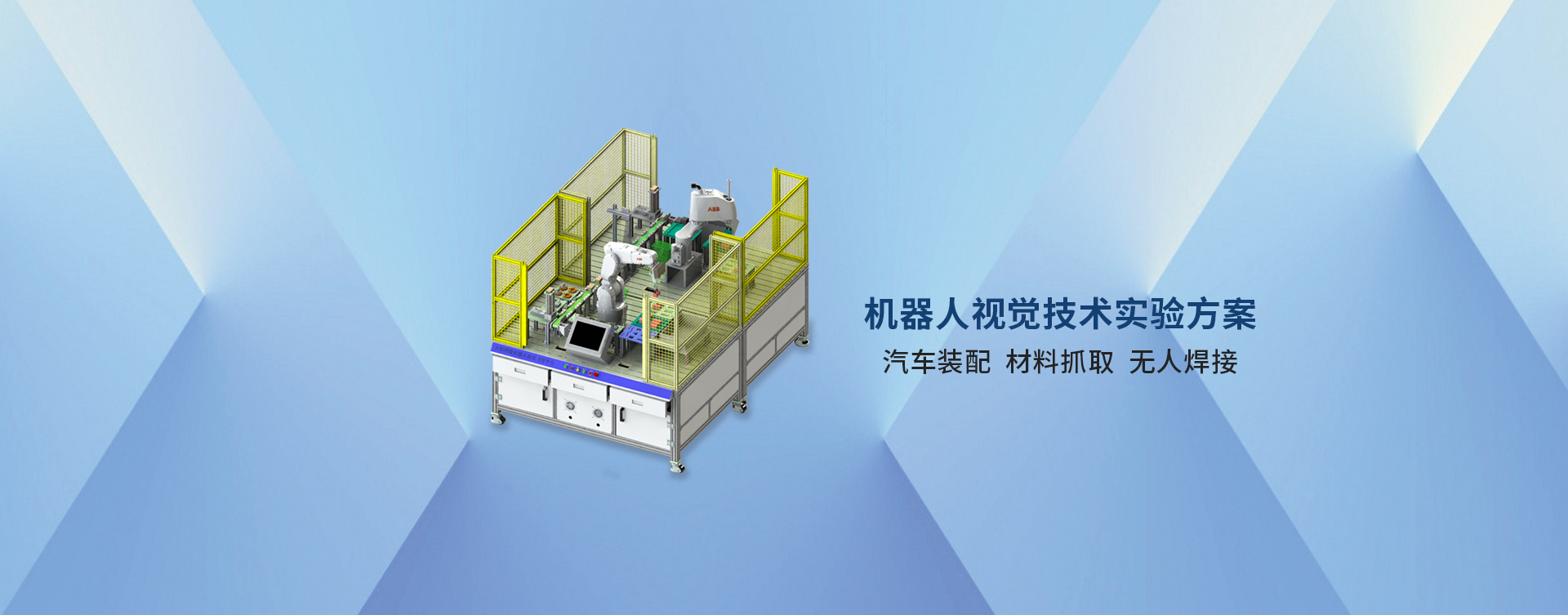
 机器视觉基础实验方案
机器视觉基础实验方案
 三维视觉技术实验方案
三维视觉技术实验方案
 高级视觉算法应用系统方案
高级视觉算法应用系统方案
 机器视觉教学实验平台
机器视觉教学实验平台